hardware · 2011
SkyTanX
A telepresence robot driven over Skype — call the robot to get its live video/audio feed, then steer it with typed commands or a vision-based virtual joystick. Zero client-side setup beyond Skype.
- Python
- Skype API
- Image Processing
- Robotics
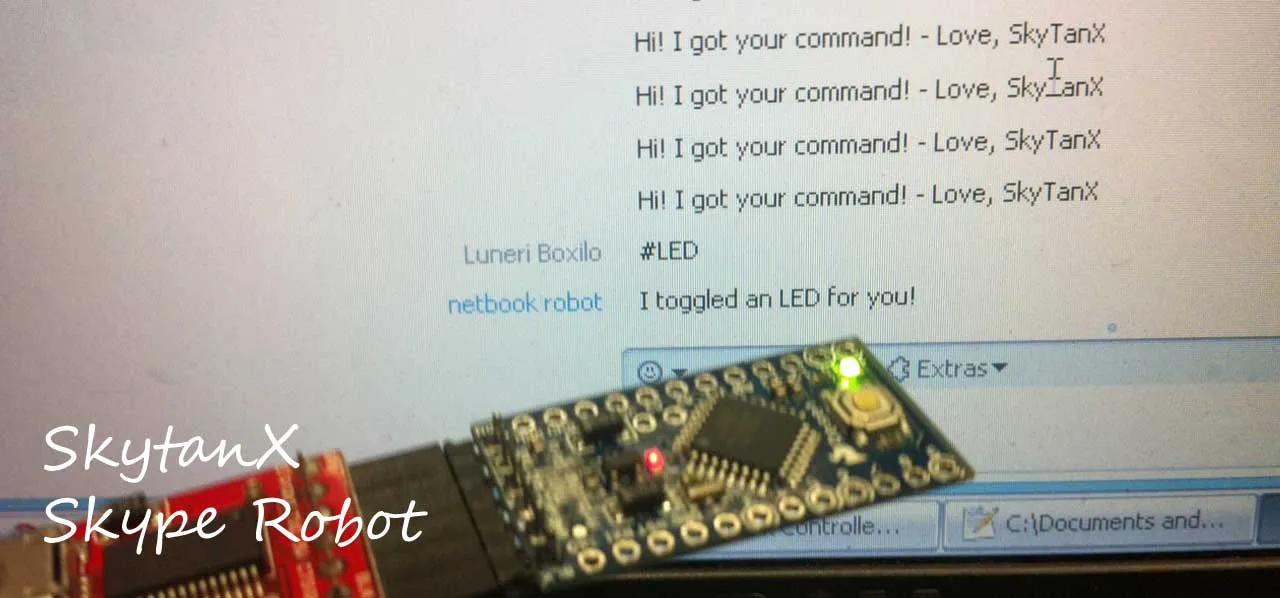
SkyTanX is a telepresence robot that uses Python and Skype. Through its Skype account, users can call the robot and receive a video/audio feed from the robot’s camera. The user can then either type in commands or use a virtual joystick system (driven by image processing) to control the robot.
The entire system is setup-free on the client side, making it easy for any user with Skype to control the robot.